Frequently Asked Questions: Thermal Imaging for Unmanned Aerial Systems

Q: WHAT IS THE DIFFERENCE BETWEEN 336 × 256 AND 640 × 512 RESOLUTION CAMERAS?
A: Each FLIR UAS thermal camera has an imaging detector which converts the heat energy it receives into a video image. The more pixels a camera’s detector has, the higher its resolution and the better its image quality. Common sUAS thermal cameras have detectors with 336 × 256, or 640 × 512 resolution. The first value represents the horizontal pixel count and the second number represents the vertical pixel count. At a quick glance, many people assume the 640 camera has twice the resolution of a 336 camera but in fact, the total pixel count is of the 640x512 is 3.8x more than the 336x256 camera. 336 × 256 delivers 86,016 total pixels and 640 × 512 delivers 327,680 total pixels.
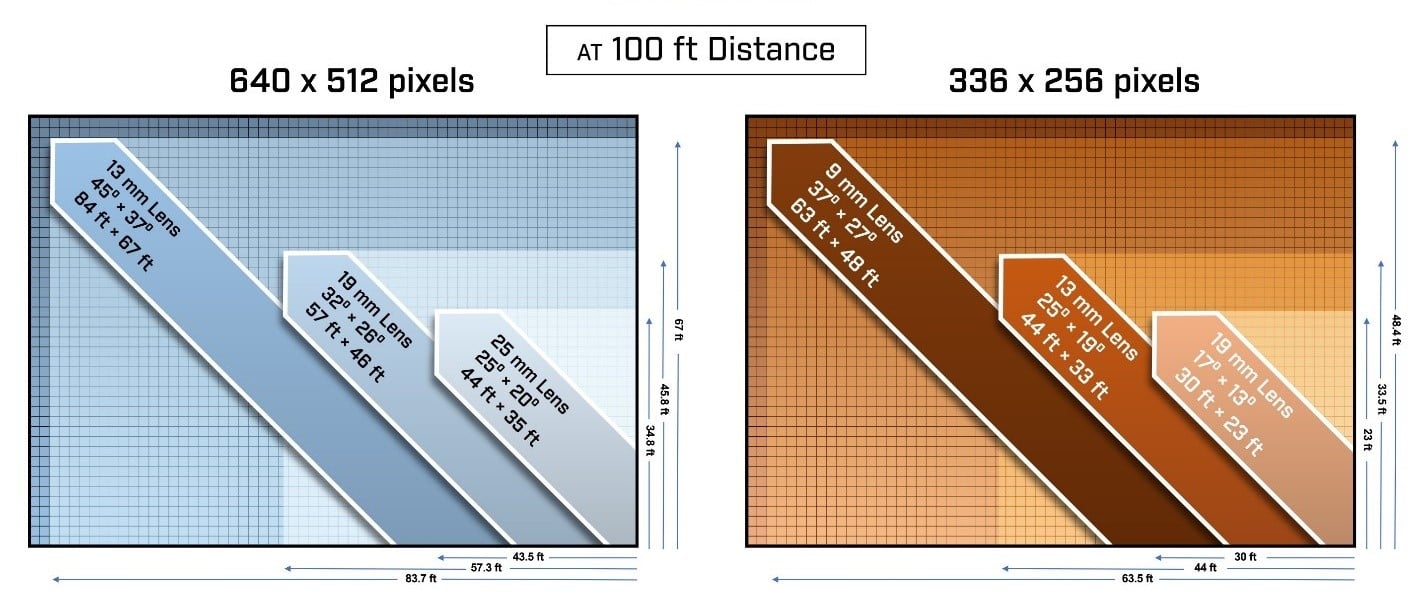
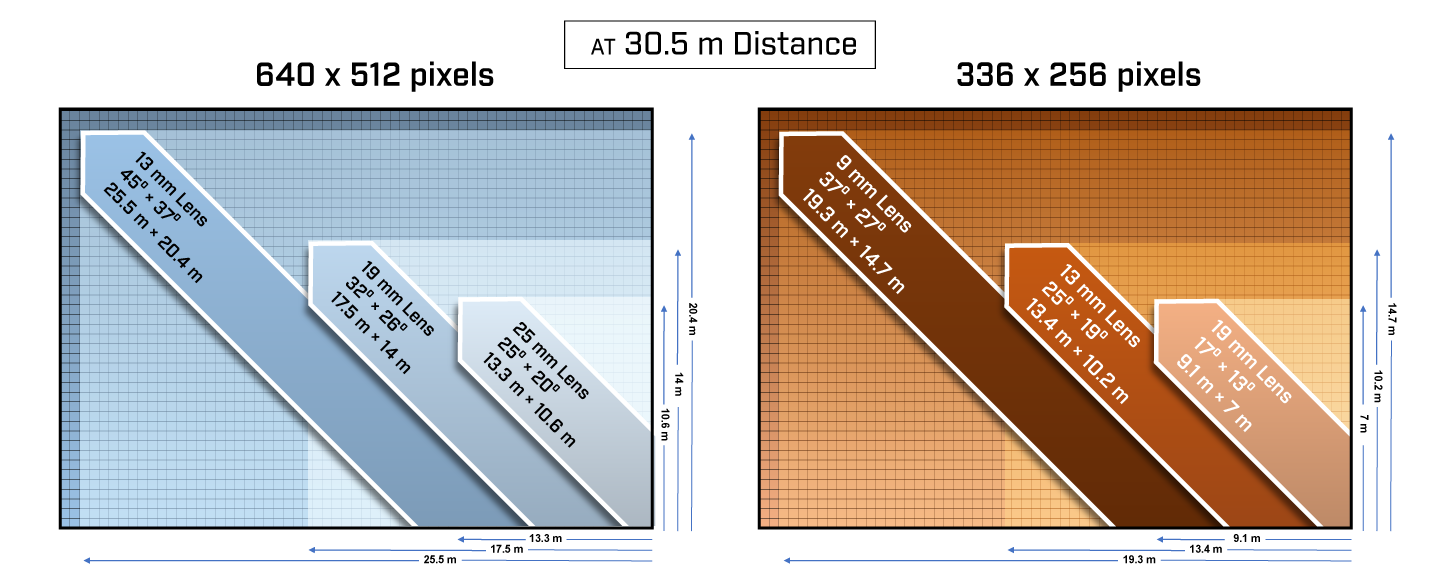
Q: WHAT IS THE FIELD OF VIEW?
A: The camera’s field of view (or, FOV) is the angular measurement of the view the camera provides. Think of it as the height and width in degrees of the window the camera is looking through. For example, each pixel in the 640 × 512, 13 mm configuration (45 × 37 degree FOV) will represent an angle of 0.07 degrees per pixel, meaning that at 100ft, each pixel is imaging 1.57 inches.
Q: CAN I DETECT METHANE GAS LEAKS WITH MY THERMAL CAMERA?
A: Gas-finding IR cameras work by detecting the absorption of light or heat energy by gasses. This absorption is typically weak and in a narrow spectrum, requiring specialized optical filters and high-quality sensors. General-purpose longwave infrared (LWIR) thermal cameras will not reliably detect these gasses. Gas-finding cameras are specially designed with narrow optical filters and typically contain a cryogenic cooler, which draws additional power and adds weight.
Q: HOW HIGH CAN I FLY WITH MY THERMAL CAMERA?
A: The maximum allowable altitude can be found under the environmental specifications on the product datasheet. While this is typically 38,000 feet MSL for most products, sUAS must be operated according to applicable laws. Also, camera resolution imposes practical limitations on useful altitudes. At an altitude of 400 feet, one pixel from a 640x512 resolution camera with a 13 mm lens would represent an area more than 6 inches across. For most thermal imaging applications, the target would have to be much closer to provide enough pixels on target for the image to be useful, or a camera with a different lens must be used. For example, at the same 400-foot altitude and a 25 mm lens, one pixel would represent an area ~3.4 inches across.
Q: HOW FAR CAN I SEE BASED ON MY LENS CHOICE?
A: There is no practical limit to how far a thermal camera can see through a clear line of sight but understanding what you are seeing is important. The moon is often visible when not obscured by clouds (water vapor absorbs IR energy). Seen from Earth, the moon subtends an angle of about 0.5 degrees, so on a 25-degree FOV 640 resolution camera, the moon would appear as about a 12-pixel wide circle.
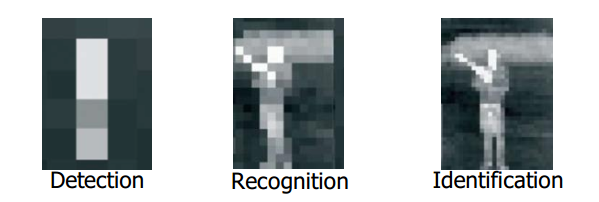
The normal limit for the target distance of an IR camera is the size in pixels that the object will appear in the image and the number of pixels that are required to identify or extract the required information about the target. For example, as shown in the image, do you want to Detect, Recognize, or Identify the person in the image? The number of pixels you place on an item allows you to make the determination.
Q: WHAT SOFTWARE IS BEST FOR MY THERMAL DATA SET OR OPERATION?
A: Different cameras offer different file types and characteristics. Also, different applications have different requirements. Higher-resolution thermal cameras more usable data products by saving images in the R.JPEG format and processing them with the FLIR Thermal Studio application. This combination allows radiometric parameters to be adjusted post-flight and provides a simple framework for generating reports. CSV files of pixel values can also be created for additional processing. FLIR Thermal Studio offers batch processing for jobs that require a large number of files.
Q: WHAT IS RADIOMETRY, AND DO I NEED IT?
A: Radiometry is the conversion of the amount of radiation coming from a target into a temperature value. This feature is not always required for a given application. Thermal images often provide information that is easily interpreted by a user. For example, when one solar panel appears noticeable cooler than its neighbors or has a more uneven temperature than its neighbors, it is not necessary to know the magnitude of the difference in degrees— that solar panel should be checked. Similarly, when one vehicle shows warm brakes and a warm engine while others don’t, it is clear which vehicle was driven last without knowing the actual temperatures. When a suspicious person is seen hiding in vegetation, it is not necessary to know the person’s body temperature. Many thermal imaging applications can be performed in this way without absolute temperature measurement. In some cases, a repeatable absolute measurement needs to be made. For example, when checking a transformer on a power pole, there may be no nearby transformers for comparison. For applications like this, a radiometric camera would be used, and the estimated surface temperature would be compared to established limits.
Q: WHICH COLOR PALETTE IS BEST FOR MY MISSION?
A: Many laboratory and military users of thermal cameras use the White Hot or Black Hot palette. Exaggerated color palettes can be used to highlight changes in temperatures that may otherwise be difficult to see, but they bring out additional noise and may mask key information. Color palettes should be chosen to show pertinent details of an image without distraction. If the FLIR R.JPEG radiometric image file format is used to save images, the color palette can be changed after a flight using FLIR Thermal Studio software.
Q: WHEN SHOULD I USE ISOTHERMS?
A: The isotherm feature highlights a range of temperatures with a color change. This can make it easy to find objects of a known temperature against a background of a different temperature or to highlight areas of a field that have exceeded a certain temperature. Isotherm is offered only on radiometric cameras. The accuracy of the isotherm feature is the same as the temperature measurement accuracy.
Q: DO I NEED SPECIAL TRAINING TO OPERATE A THERMAL CAMERA?
A: For many uses of thermal cameras, the information presented is so intuitive that little or no training is required to get results. There are free videos on FLIR Delta and other FLIR web pages that can be used to get started. Operators with more experience will get even more from the thermal images. Some applications require formal training and certification for fast, consistent collection and interpretation of thermal data. Comprehensive training and certification services are available from the FLIR Infrared Training Center (ITC).
Q: HOW CAN I REDUCE HALO EFFECTS OR VIGNETTING IN MY IMAGES?
A: All thermal cameras have some image non-uniformity. This often takes the form of cooler edges and corners, which causes a halo effect. The more extreme color palettes available on your camera are created to exaggerate any details in the image. A low-contrast scene has fewer details, so the colors will be applied to noise or other artifacts. In most cases, it is easier to interpret thermal images with the White Hot or Black Hot palette, as these show more consistent contrast. Also, scenes with people or other warm objects will “stretch” the colors, making the halo less noticeable.
Q: CAN I CHANGE THE LENS ON MY THERMAL CAMERA?
A: No, this will void the camera warranty. Removing the lens on a thermal camera exposes the detector window to dust and other contaminants from the air and to debris from the lens threads. Any dust particle on this window will create an image artifact.
Q: WHY DOES THE IMAGE APPEAR TO “FREEZE” SOMETIMES BEFORE RETURNING TO NORMAL OPERATION?
A: IR cameras perform a NUC (Non-Uniform Correction) prior to adjusting level and span. This automatically corrects the minor detector drift that occurs as the scene and environment changes. The camera will also perform this operation on its own from time to time. Think of this as setting all the pixels back to a base reference point.
Q: CAN I EXPORT OR TRAVEL INTERNATIONALLY WITH MY THERMAL CAMERA?
A: There are international regulations regarding the transportation and transfer of all thermal cameras. Contact an export specialist for details.
Related Articles
-
 Press Release
Press Release
Teledyne FLIR debuts SIRAS Drone for Public Safety and Industrial Inspection
Read the story -
 Whitepaper
Whitepaper
DELTA Solution Series - Part 3: Overhead Electrical Drone Inspections
Learn more -
 Whitepaper
Whitepaper
DELTA Solutions Series - Part 4: Thermal Inspection of Solar Panels
Learn more