Machine Vision Interface Comparison and Evolution
Getting the most out of Integrated Imaging Solution's USB 3.1 cameras
Article Breakdown:
-
- INTERFACE COMPARISON
- FIREWIRE (IEEE 1394)
- CAMERA LINK
- GIGABIT ETHERNET (GIGE)
- UNIVERSAL SERIAL BUS (USB 3.1)
Machine Vision Interface Comparison and Evolution.pdf
In today’s thriving machine vision industry, there is a number of competing interface standards. Each standard arose with the goal to out-perform the previous one and address more complex system requirements. In order to understand how each interface compares, it is important to know the evolution of their development. This paper analyzes the merits of four of the most popular imaging interfaces and describes how they accelerated the growth of the machine vision industry.
| FireWire (IEEE1394b) | Gigabit Ethernet | USB 3.1 | Camera Link | |
| Bandwidth | 80 MB/s | 125 MB/s | 400 MB/s | 680 MB/s (Full) |
| Cable length | 4.5 m | 100 m | 3 m | 10 m |
| CPU usage | Low | Medium | Low | Medium |
| Consumer Acceptance |
Declining | Excellent | Excellent | None |
| Difficulty of System Integration | Medium | Low | Low | High |
| Power Delivery | 45 W | 15.4 W1 | 4.5 W | None |
| Multiple cameras | Excellent | Good | Excellent | Fair |
| System Cost (Single Camera) | Medium | Medium | Low | High |
| Vision Standard | IIDC DCAM | GigE Vision | USB3 Vision | Camera Link |
Table 1: Interface Comparison
The table above is a high level comparison based on the following features:
-
- “Bandwidth” is the amount of data the interface can deliver.
- “Cable length” dictates how far a camera can be from the host system.
- “Consumer acceptance” rates how ubiquitous an interface is. Generally, any technology with high consumer acceptance spurs enough competition to make it easily available, easy to use, and lower cost.
- “Difficulty of integration” is the amount of engineering effort required to implement a machine vision system on the selected interface.
- “Power delivery” is the amount of power that can be delivered over the interface cable itself.
- “Multiple cameras” rates how well the interface supports multiple camera system
- “System cost” indicates the cost for the system based on the cost of camera peripherals needed to implement a single camera system. This does not include the cost of the camera.
- “Vision standard” is the corresponding interface standard that supports the interface.
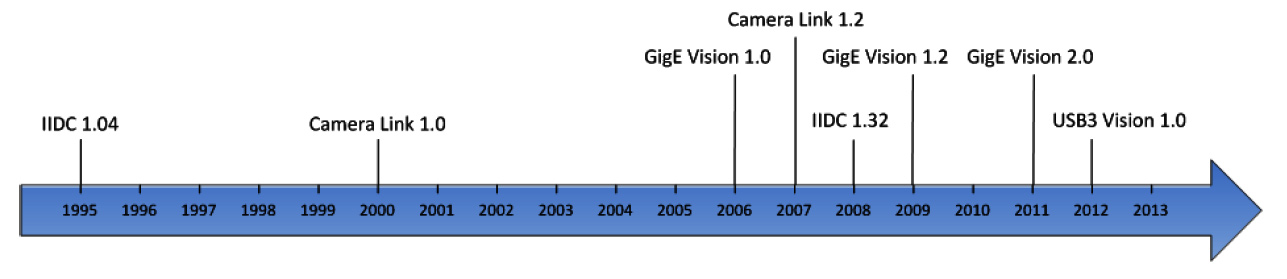
This timeline illustrates important milestones in the development of the various machine vision standards. IIDC and Camera Link are two of the older standards and differ greatly from each other. GigE Vision and USB3 Vision are more recent standards and have more commonality between them.
FireWire (IEEE1394)
![]()
Created in 1995 by the 1394 Trade Association to promote FireWire products, the IIDC DCAM standard was one of the first viable digital interface standards to be available. This is why, the majority of today’s machine vision systems are based on FireWire. Although IIDC was not created by the machine vision industry, it has been widely adopted by the industry for its common protocol interface. The IIDC specification provides a global register map for all FireWire cameras to follow, allowing third-party applications to become camera vendor agnostic. System integrators can switch between camera models and camera vendors with minimal impact to their application as long as the cameras support IIDC. FireWire is also highly effective for multi-camera systems. It provides the ability to daisy chain cameras and create multi-camera systems without the use of hubs. FireWire cameras use a peer-to-peer communication protocol and provide the ability to synchronize trigger broadcast with other cameras on the same bus. In terms of bandwidth allocation, FireWire uses isochronous transfer which allocates and guarantees bandwidth for each device on the same bus. For these reasons and because it is proven reliable in a wide variety of applications, FireWire continues to be popular interface.
Camera Link
![]()
As machine vision applications became more demanding, there was a need for an interface, and corresponding standard, capable of supporting more machine vision specific features and much higher bandwidths. Led by the AIA, members of the machine vision community worked together to design the Camera Link interface. Camera Link supports Direct Memory Access which reduces the load on the CPU when capturing images. This creates more CPU cycles dedicated to other things such as post processing of images. Camera Link also separate control signals with video signals, providing low latency triggering and data delivery. Camera Link supports up to 680MB/s of data transfer. The high bandwidth allows higher resolution sensors, higher frame rate and high bit depth images. The tradeoff for higher bandwidth is cost. Compared to other interfaces, the cost is quite high as a frame grabber and a power supply are needed for every camera in the system. However, having a frame grabber in the system does off-load some of the processing done by the CPU. Frame grabbers can also buffer images, with some high-end frame grabbers even offering some hardware image processing capabilities.
Despite low consumer acceptance and its high cost, Camera Link is widely used for applications requiring real time processing and high bandwidth.
Gigabit Ethernet (GigE)
![]()
With the wide spread deployment of Gigabit Ethernet on PC and laptops, it became a strong contender as a viable machine vision interface. In 2006, members of AIA came together to develop the first GigE Vision standard. A challenge the members wanted to address is the limitation of camera register mapping. And with that, the Generic Interface for Cameras (GenICam) was born. GenICam was designed to promote interoperability both within an interface and across interfaces. This implementation has certain advantages over FireWire’s IIDC DCAM fixed register address approach which limits camera vendors’ ability to define features. GigE Vision uses GenICam's XML approach for camera configuration and additionally provides a framework describing how imaging and video devices transmit data over Ethernet. The GenICam XML file provides a standard for mandatory features as well as the flexibility to develop custom features.
The most attractive feature of GigE Vision is the support for longer cable lengths. Compared to FireWire’s maximum single cable length of 4.5 meters and Camera Link’s 10 meters, GigE Vision supports up to 100 meters without the use of active repeaters. GigE also allows integrators to easily scale up their system with the use of Ethernet switches. Since each camera can be addressed using an IP address, there’s no limit on how many cameras can operate on the same network. Ethernet cables are capable of delivering power to the cameras using PoE (Power over Ethernet) over 100 meters of cable; this is both difficult and costly to do with FireWire and Camera Link. The low cost of Cat 5e and Cat 6 cables makes GigE the most cost effective solution when long cable length is required.
Universal Serial Bus (USB 3.1)
![]()
The development of the USB 3.1 interface was originally driven by the consumer need for a PC based interface with higher bandwidths. The previous PC interface, USB 2.0, is unable to support transfers of high data files such as movies and games between sophisticated mobile peripherals at fast interactive speeds. The USB 3.1 interface came to market in 2009 with support for up to 440MB/s of bandwidth; 10 times faster than USB 2.0 and 5 times faster than FireWire-B.
Adoption of the interface increased by mid-2012, support from major vendors such as Intel, AMD, Microsoft, Apple and the Linux community are either announced or already a reality. Thus, it is predicted that by 2015, every new PC will support USB 3.1. With adoption of this magnitude, vendors can build applications and deploy them on almost any PC without the need of additional hardware such as frame grabbers and host adapter cards. Pricing for peripherals that are required, such as cables and hubs, will benefit from a highly competitive consumer oriented marketplace.
In terms of machine vision, USB 3.1 offers a number of attractive features in addition to the high bandwidth. USB 3.1 supports Direct Memory Access which allows the data to be written directly to memory reducing CPU processing load. USB 3.1 is capable of delivering up to 4.5W of power over a single USB 3.1 cable, and is easily scalable in to a multiple camera system by using USB 3.1 hubs.
In 2011, the AIA decided to once again lead a group of machine vision vendors in creating a new interface standard: USB3 Vision. Based on the success of GigE Vision, USB3 Vision follows the same robust framework using the GenICam programming interface and XML description files. With this commonality between the two standards, system integrators will be able to easily learn one after working with the other. With its high bandwidth, ease of use, and low cost; USB 3.1 is ideal for a wide variety applications both within machine vision and in the consumer world.
Choosing the right interface
By understanding how each interface standard came about and its role in the machine vision industry, users can have a better overall perspective when comparing these interfaces and deciding which to use for their application. With the broad range of requirements addressed by machine vision systems, there is no single interface that can address them all. Each interface has its own unique strength that makes it more effective and efficient for certain kinds of applications.