INDUSTRIAL
Optical Gas Imaging
FLIR optical gas imaging (OGI) cameras can help you perform infrared gas detection, spotting methane (CH4), sulfur hexafluoride (SF6), hydrocarbons, and hundreds of other industrial gases quickly, accurately, and safely—without shutting down systems. These cameras allow you to scan broad sections of equipment rapidly and survey areas that are hard to reach with traditional contact measurement tools. OGI cameras can also detect leaks from a safe distance, displaying these invisible gases as clouds of smoke.
![]()
Why Choose FLIR OGI Cameras?

Rapid and accurate detection
FLIR OGI cameras offer quick, highly precise infrared detection of various industrial gases. They allow you to scan wide sections of equipment and access hard-to-reach areas effectively.
Stay safe with distance recognition
Safety is guaranteed with FLIR OGI cameras' ability to visualize gas leaks and display them as clouds of smoke. It allows you to identify hazardous leaks from a safe distance.
High-resolution clarity
With its high-resolution capabilities of up to 640 × 480 (307,200 pixels), FLIR G-Series OGI cameras are highly effective gas detectors, offering you superior detail on small leaks from a distance.
Innovative quantification analytics
FLIR G-Series cameras for methane, hydrocarbons, and other volitile organic compounds (VOCs) embed advanced quantification analytics so you can directly measure the size of gas leaks and determine severity without requiring a secondary devices.
![]()
The NEXT GENERATION of Infrared Hydrocarbon Gas Detectors
Whether you need higher resolution—to see small leaks from a safe distance—or you are looking for a more cost-effective way to find invisible methane leaks, the latest gas detection cameras from FLIR offer the sensitivity and features you need to find leaks quickly and work safely.
![]()
The FLIR G620, G306, and GF77 are among the latest additions to the FLIR OGI series, offering effective infrared gas detectors plus advanced features for environmental monitoring and highly accurate temperature measurements for predictive maintenance applications.



FLIR received third-party validation of the FLIR GF-Series and G-Series cameras' compliance with the following sensitivity standard laid out by the EPA in the NSPS OOOOa methane rule:
Your optical gas imaging equipment must be capable of imaging a gas that is half methane, half propane at a concentration of 10,000 ppm at a flow rate of ≤ 60 g/hr from a quarter inch diameter orifice.

See hydrocarbon gas leaks clearly
Scan thousands of connections for natural gas (methane) and other hydrocarbon leaks quickly and safely using FLIR G-Series cameras, avoiding regulatory violations, fines, and lost revenue.


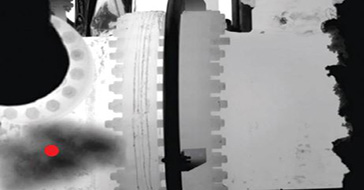
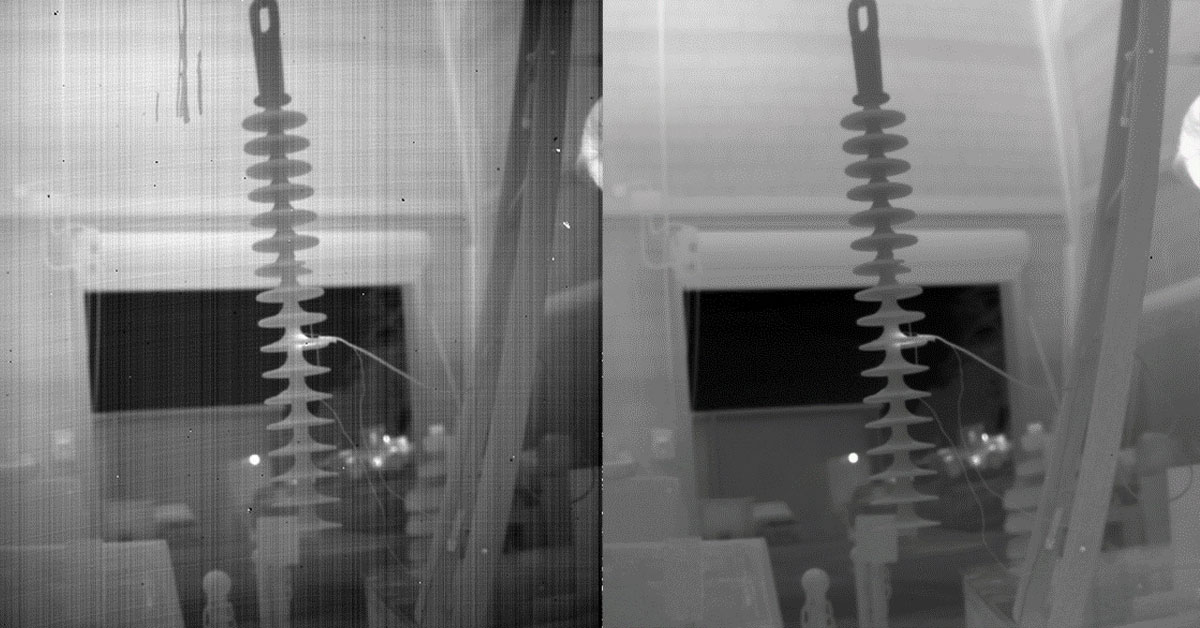
Find SF6 gas leaks easily
FLIR G306 cameras can examine substation circuit breakers for sulfur hexafluoride (SF6) leaks at a safe distance from high-voltage areas, without the need to shut down operations.


Find leaks at steel plants
FLIR G346 cameras help protect workers and the environment from toxic levels of carbon monoxide (CO) by performing infrared gas detection quickly and efficiently.


Detect leaks from hydrogen-cooled generators
Imaging the tracer gas, CO2, with a G343 OGI camera allows operators of hydrogen-cooled generators to efficiently find hydrogen leaks.


Detect R-124 compressor leaks
Employing FLIR G304's infrared technology allows for early detection of gas leaks. It can help avoid interruptions in operations, prevent the loss of perishable products, and limit the environmental impact of toxic refrigerants.